# 祺云™使用手册
# 概述
祺云(SkyScout®)无人机调度系统,简称祺云底座,是无人机自动化运营系统的上层建筑。祺云底座具备下述功能:
# 1. 任务管理
✓ 可视化航线规划,可设定路点巡航任务、2D 扫图任务或 3D 建模任务,在任务路点上支持自定义高度、角度、停留时间、录像、拍照等多种动作
✓ 支持第三方任务导入
✓ 支持手动下发任务与定时排班任务
# 2. 远程操控
✓ 自动与手动一键切换(随时随地中断自动巡航,随时随地恢复自动巡航)
✓ 云台载荷指令集 (PTZ:偏转、俯仰、变焦控制,多光谱切换,一键拍照、录像)
✓ 远程飞行控制 (无人机姿态控制、一键返航、一键备降)
# 3. 实时监控
✓ 超低时延高清图传:无人机第一视角 FPV、机库站点监控视角、机库内窥视角,高达 1080P 30fps 的实时回传,端到端时延低至 500 毫秒
✓ 可视化遥测数据:齐备的无人机与机库状态报文,直观的虚拟仪表,2D 与 3D 轨迹呈现
# 4. 数据回看
✓ 支持以任务批次或时间段为查询依据回放历史飞行数据、影像,并提供下载
✓ 支持无人机、机库运行日志的调取
✓ 支持原始媒体数据自动上传至指定存储空间,并按任务批次归类整理
# 5. 诊断告警
✓ 依据气象信息、无人机状态、机库状态等要素的实时诊断与告警
# 6. 远程维护
✓ 用户信息、站点信息、机库信息、无人机信息的登记、修改以及权限维护
✓ 机库的远程操作
# 说明
本说明文档仅针对祺云底座部分,即排除 AI 定制模块(因不同应用场景而异)的普适部分作出使用说明。
祺云底座依据部署环境、运行模式、用户终端三类划分标准共计可为用户提供2 × 2 × 3 = 12种细分终端版本,本说明文档将基于公有化部署环境、孤岛运行模式下的 Web 用户终端版本进行说明,其它细分版本在人机交互界面、操作逻辑、开放功能上虽有若干差异,但用户在熟悉本说明文档后理应能快速适应其它细分版本的使用。针对需要特别注意的差异部分,将以额外注释的方式加以附加说明。
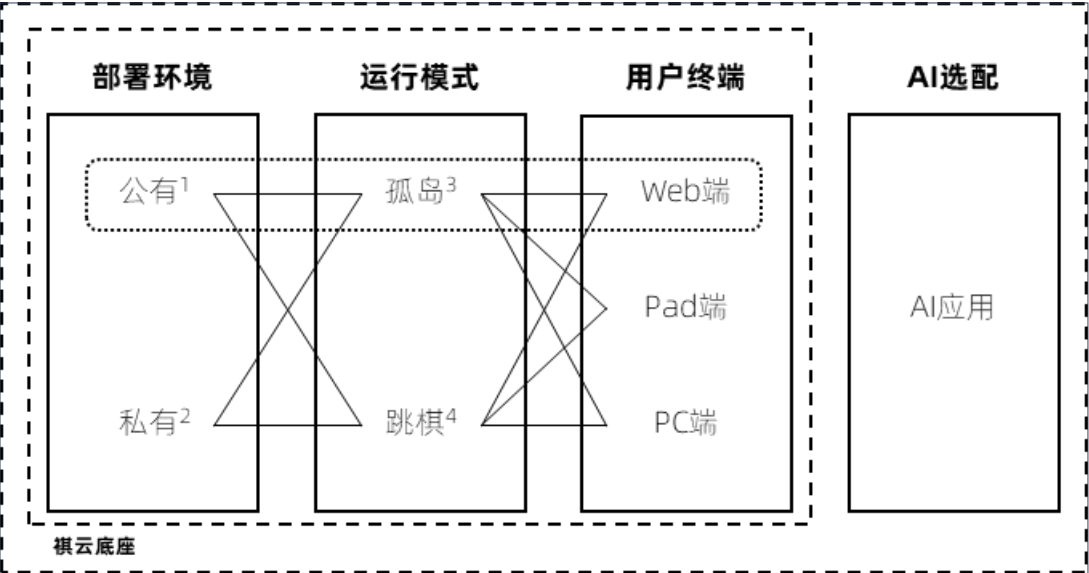 【注 1】“公有”特指星逻智能部署在公有云的面向所有用户的祺云无人机调度系统。用户通过互联网使用账号访问其权限下的无人机及机库设备。公有化部署环境下的所有媒体数据、资源数据、信息数据皆来源于互联网或经由互联网传播。
【注 1】“公有”特指星逻智能部署在公有云的面向所有用户的祺云无人机调度系统。用户通过互联网使用账号访问其权限下的无人机及机库设备。公有化部署环境下的所有媒体数据、资源数据、信息数据皆来源于互联网或经由互联网传播。
【注 2】“私有”指在用户侧私有化网络环境中部署的祺云无人机调度系统,所有服务本地化部署在用户独立机房中,所有媒体数
据、资源数据、信息数据皆在内网中获取、流转。
【注 3】“孤岛”是指由于无人机依赖射频链路与地面射频基站(机库的附属设备)保持通讯,从而通过机库站点的以太网间接接
入云端,这使得无人机与机库之间存在 1 对 1 的绑定关系,无人机必须在地面射频基站的有效范围内活动,且必须遵循“从哪里来
回哪里去”的运行模式,因此此种运行模式称为孤岛模式。
【注 4】“跳棋”是指由于无人机依赖自身的 4G 或 5G 网络接入能力直接接入云端,这使得无人机能够与机库解耦,无人机飞行范
围不受限制,可以在不同机库站点之间起降,因此此种运行模式称为跳棋模式。
星逻智能致力于为用户提供业界领先的无人机自动化调度管理平台,因此祺云底座的功能矩阵将适应场景需求不
断升级优化。鉴于祺云底座处于常态化更新的过程中,我们会努力保持祺云底座说明书同步更新,偶然情况下,您看
到的祺云底座实际功能或界面可能与说明书不符,敬请谅解,并及时告知我们,我们会给予您详尽的解答并加速修订。
# 前置事项
# 1. 祺云系统支持的无人机型号:
DJI Matrice 300RTK, DJI Matrice 210V2, DJI Matrice 210, DJI Phantom 4 Pro, DJI Phantom 4 RTK, DJI Mavic 2 Enterprise, DJI Mavic 2 enterprise Advanced
# 2. 祺云系统支持的无人机站点(广义)型号:
SKYSYS UltraHive MK4 Pro(充换一体库), SKYSYS UltraHive MK5(充电库), SKYSYS MobileHive Mk3(航 母 ) , SKYSYS GroundHub Mk1 ( 单 兵 中 枢 ) , SKYSYS GroundMast Mk1 ( 射 频 基 站 ) , DJI Smart Controller Enterprise
# 3. 祺云系统支持的无人机自动驾驶仪型号:
SKYSYS SkyCab N5 4G/5G, SKYSYS SkyCab T5 4G/5G
# 4. 运行环境:
操作系统:Windows 或 MacOS 适配浏览器:Edge,Chrome,Safari,Firefox 5. 账号分级: 祺云采用系统管理员、管理员、企业管理员、项目管理员、操作员、访客六级角色管理,每个角色对应的权 限不一,其中系统管理员、管理员为祺云公有云服务的后台管理账户角色,由星逻智能技术支持专员持有并 使用。客户可能分配的账号角色为企业管理员、项目管理员、操作员、访客中的一种,在正式使用前需完成 账号的注册与赋权。
# 首页
主界面显示
登录成功后进入首页,首页主要显示权限下的所有站点的实时位置,表示站点的机库。如颜色为灰色,表示该机库处于离线状态。单击机库图标,机库右侧会出现它的信息面板,点击地图其他地方,面板会消失。面板信息主要为该站点的名称、站点无人机型号、机库的型号,以及型号对应的图片。面板下方“操作中心”按钮,左单击可进入该站点的操作中心,可查看站点机库与无人机的实时报文等,也可在操作中心页操控无人机等设备。
点击logo区域无论当前在哪个页面将跳转至首页。
 :点击此按钮收缩左侧菜单面板,此刻按钮变为
:点击此按钮收缩左侧菜单面板,此刻按钮变为 。
。
:点击按钮展开右侧菜单面板,此刻按钮变为。
 :点击按钮将进入网页的全屏模式,此刻按钮变为。
:点击按钮将进入网页的全屏模式,此刻按钮变为。
 :点击按钮退出网页的全屏模式,此刻按钮变为。
:点击按钮退出网页的全屏模式,此刻按钮变为。
 :用户按钮,点击此按钮出现功能菜单,可退出登录。
:用户按钮,点击此按钮出现功能菜单,可退出登录。
# 地图操作
祺云地图基于WGS84坐标,在地图上滚动鼠标滚轮可进行缩放调整地图显示比例,点击鼠标左键拖动可移动地图。
地图参数显示
左下角包括当前缩放级别、比例尺、放大缩小地图功能按钮
1. :放大一级地图等级。
:放大一级地图等级。
2. :缩小一级地图等级。
:缩小一级地图等级。
3. :地图的比例尺。
:地图的比例尺。
图层显示设置
道当鼠标滑过图标,展开为:,各个图标单击出现蓝色边框视为显示对应图层,反之隐藏。默认显示街道图层,隐藏卫星与自建图层,其中:
a. :显示/隐藏街道图层,和卫星图层显示互斥。
:显示/隐藏街道图层,和卫星图层显示互斥。
b. :显示/隐藏卫星图层,和街道图层显示互斥。
:显示/隐藏卫星图层,和街道图层显示互斥。
c. :显示/隐藏自建图层,最高级别的图层,它优先显示在街道图层和卫星图层上。
:显示/隐藏自建图层,最高级别的图层,它优先显示在街道图层和卫星图层上。
显示要素:
地图要主要显示的数据包括:站点、无人机、航线、实时轨迹、历史轨迹。其中航线为橘色的折线,航线上黄色的圆圈表示航点,当为红色时表示为选中的航点。
# 任务规划
无人机执行的任务主要来源于此,良好的任务规划将事半功倍。任务规划主要以地图打点和航线、航点参数设置为主要步骤,用与设置无人机执行任务时飞行的路径以及途经执行的动作。在规划一次任务时需要考虑到航点间距的限制(不得超过1.5公里),所有航点与所选站点的距离限制(不得超过5公里),以及总里程不得超过30公里。此外还需考虑到无人机自身型号是否支持所设置的航点数量。
当需要无人机执行规划完毕的任务时,可在“操作中心”界面进行任务的下发,对于需要重复执行的任务可在计划任务中创建此任务的定时任务,无需每次手动地在“操作中心”下发任务。
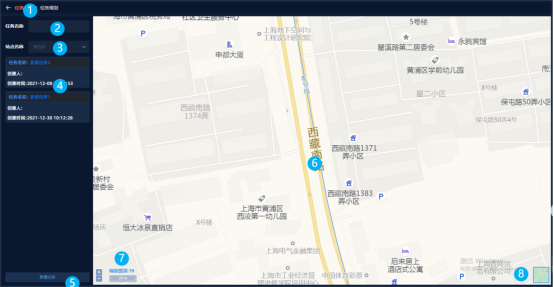
# 主界面介绍
返回
点击返回主界面。搜索
在输入框中输入关键字,进行任务搜索。站点
下拉选择指定站点并展示此站点的所有任务列表。任务列表
展示当前条件下的所有任务。创建任务
创建任务入口,创建成功的任务可以在操作中心 向无人机进行任务的下发,或者在计划任务界面定时执行此任务。地图界面
显示地图。滚动鼠标滚轮可进行缩放,点击鼠标左键拖动可移动地图。地图参数显示
包括当前缩放级别、比例尺、放大缩小地图功能按钮
a. :放大一级地图等级。
b. :缩小一级地图等级。
c. :地图的比例尺。图层显示设置
道当鼠标滑过图标,展开为:,各个图标单击出现蓝色边框视为显示对应图层,反之隐藏。默认显示街道图层,隐藏卫星与自建图层,其中:
d. :显示/隐藏街道图层,和卫星图层显示互斥。
e. :显示/隐藏卫星图层,和街道图层显示互斥。
f. :显示/隐藏自建图层,最高级别的图层,它优先显示在街道图层和卫星图层上。
航线编辑界面关闭右侧面板
 :关闭右侧信息面板,同时取消任务航线编辑模式。
:关闭右侧信息面板,同时取消任务航线编辑模式。任务名称
点击文字可编辑任务名称。保存任务
 :保存任务。
:保存任务。删除航点
:删除选中的航点。参数列表
参数列表包含以下通用元素。详见参数设置说明 。
任务信息:包括航线长度、预计执行所有航线时间、航点数等。
滑块及-/+:对于所有滑块,左右滑动可调节参数值。点击/+可微调数值。
点击文本框可输入经纬度的数值;点击右侧的方向按键可进行微调,上下方向调节纬度,左右方向调节经度。
# 创建任务
- 用户可通过以下两种方式新建任务:
a.点击左下角“新建任务”按钮,在弹框中点击 图标,然后选择站点,并输入任务名称,点击确定进入任务编辑模式,编辑完毕保存任务,直接退出任务界面将不会保存该任务。
图标,然后选择站点,并输入任务名称,点击确定进入任务编辑模式,编辑完毕保存任务,直接退出任务界面将不会保存该任务。
b.点击左下角“新建任务”按钮,在弹框中点击 图标,从计算机中选择任务文件(KML或JSON类型的文件)并导入,然后点击确定,如需要编辑此任务可直接编辑,然后保存任务,直接退出任务界面将不会保存该任务。
图标,从计算机中选择任务文件(KML或JSON类型的文件)并导入,然后点击确定,如需要编辑此任务可直接编辑,然后保存任务,直接退出任务界面将不会保存该任务。 - 航线编辑:
进入任务编辑模式后,若选择了站点,在地图上该站点位置会出现 图标标记为该站点,同时默认规划的航线在以此站点为圆心半径5公里以内,显示如下:
图标标记为该站点,同时默认规划的航线在以此站点为圆心半径5公里以内,显示如下:

鼠标左单击地图进行航点添加,单击地图上的航点将选中此航点,选中的航点为红色,未被选中的航点为黄色。选中的航点可通过鼠标拖动的方式改变经纬度,在此范围外设置了航点或相邻航点距离超过1.5公里是不被允许的,将出现“超出范围”或“航点距离过大”的错误提示。当存在选中的航点,继续单击地图则视为在此航点后插入新的航点。这些航点首尾相连组成飞行路线。需要注意的是:使用大疆Phantom 4RTK飞行器时,航点数不可超过199个,使用大疆其他飞行器时,航点数不可超过99个。当航线编辑完成后,可点击航线编辑界面3按钮保存任务。
# 编辑任务
在界面左侧的任务列表点击一条任务,地图上会绘制出该航点以及显示该任务的站点。点击图标 进入编辑模式,默认选中最后一个航点,此时右侧将出现航线编辑界面,可以进行航线或航点的参数设置 ,编辑完毕记得保存编辑,直接退出任务界面将不会保存该任务。
进入编辑模式,默认选中最后一个航点,此时右侧将出现航线编辑界面,可以进行航线或航点的参数设置 ,编辑完毕记得保存编辑,直接退出任务界面将不会保存该任务。
# 删除任务
点击一条任务,在选中的任务下方出现两个图标 ,点击
,点击 将弹出提示“此操作将永久删除该文件, 是否继续?”,点击“确定”删除该任务,提示删除成功,地图清除航线,列表中此任务也将消失。
将弹出提示“此操作将永久删除该文件, 是否继续?”,点击“确定”删除该任务,提示删除成功,地图清除航线,列表中此任务也将消失。
参数设置
参数设置包括:航线设置与航点设置。当新建一条任务时或在界面左侧单击选择了一条任务点击图标进入了编辑模式,在右侧将会出现任务的参数设置面板。界面如航线编辑界面所示。
航线设置:
在参数面板中,点击右侧面板中的 图标,进行航线设置:
图标,进行航线设置:
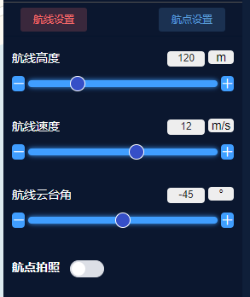
航线高度
设置默认各个航点的高度,范围为0米至500米,默认120米。航线速度
设置默认各个航点的速度,范围为1米/秒至20米/秒,默认12米/秒。云台俯仰角
设置默认各个航点的云台俯仰角,范围为-90°至0°,默认-45° 。
航点设置:
点击选中地图上航点,点击右侧面板中的 图标,点击
图标,点击 切换为前一个航点,点击
切换为前一个航点,点击 切换为后一个航点,进行选中的航点设置:
切换为后一个航点,进行选中的航点设置:

方向按键
点击按键可上下左右调整航点位置,每次按键步长为0.000005°。
2. 偏航角
设置无人机飞至此航点的偏航角,范围为-180°至180°,默认90°。
3. 云台俯仰角
设置无人机飞至此航点的云台俯仰角,范围为-180°至180°,范围为默认 -45°。
4. 航点高度
设置无人机飞至此航点的高度,范围为0米至200米,默认120米。
5. 航点拍照
设置无人机飞至此航点是否执行拍照动作,默认不拍照,选中后为执行拍照动作。
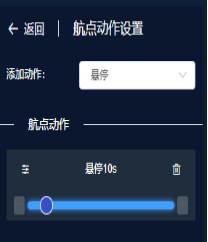
6. 编辑动作
该航点动作存在的动作将以列表的形式列出。点击 进入航点动作设置面板,可添加更多的航点动作,每个动作有一个滑块及-/+,对于所有滑块,左右滑动可调节参数值。点击+可微调数值。
进入航点动作设置面板,可添加更多的航点动作,每个动作有一个滑块及-/+,对于所有滑块,左右滑动可调节参数值。点击+可微调数值。
a. :返回航点设置。
:返回航点设置。
b. 删除对应的航点动作。
删除对应的航点动作。
航点的动作包括:
a.悬停: 设置无人机飞至此航点悬停的时间,范围为5秒至60秒 默认10秒。
b.开始录像:设置无人机飞至此航点无人机执行录像动作。
c.停止录像:设置无人机飞至此航点无人机执行停止录像动作。
d.云台俯仰角:设置无人机飞至此航点云台俯仰角,范围为-90°秒至0° 默认-45°。
e.拍照:设置无人机飞至此航点执行拍照动作。
f.偏航角:设置无人机飞至此航点的偏航角,范围为-180°秒至180° 默认0°。
g.变焦:设置无人机飞至此航点镜头的变焦倍数,范围为1倍至30倍 默认5倍。
# 执行任务
进入操作中心下发任务,参考操作中心,或者在计划任务中创建该任务定时任务。
# 操作中心
操作中心页面是设备监视与管理的重要环节,在 此页面可以完成对无人机任务的下发以及控制无人机。可以通过点击站点列表的“操作中心”按钮 进入指定站点的操作中心,也可以通过首页点击某个站点图标展开信息并点击“操作中心”按钮进入。
进入指定站点的操作中心,也可以通过首页点击某个站点图标展开信息并点击“操作中心”按钮进入。
进入某个站点的操作中心页面后,将与该站点的设备进行实时通信,获取该站点机库的实时信息,该站点无人机的实时信息,以及该站点其他传感器信息(如天气情况)。在网络畅通的情况下若出现设备离线的情况,可联系运维人员进行处理。
# 主界面介绍
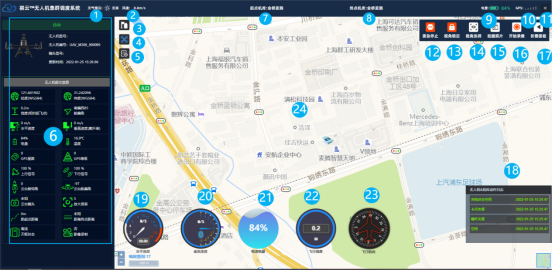
1.天气
显示当前的天气情况
 :表示当前无雨。
:表示当前无雨。
 :表示当前有雨。
:表示当前有雨。
2.风速
显示当前的风速,单位为 米/秒。
3.左侧面板切换为机库报文
 :点击后图标变为蓝色
:点击后图标变为蓝色 表示当前左侧信息面板显示为机库的实时报文信息,包括编号、类型、工作状态、是否充电等,详情参考机库报文界面。
表示当前左侧信息面板显示为机库的实时报文信息,包括编号、类型、工作状态、是否充电等,详情参考机库报文界面。
4.左侧面板切换为无人机报文
 :点击后图标变为蓝色
:点击后图标变为蓝色 表示当前左侧信息面板显示为无人机的实时报文信息,包括实时的经纬度、飞行高度、载荷信息等。默认为蓝色图标,即默认左侧面板显示无人机实时报文信息,详情参考:无人机报文界面。
表示当前左侧信息面板显示为无人机的实时报文信息,包括实时的经纬度、飞行高度、载荷信息等。默认为蓝色图标,即默认左侧面板显示无人机实时报文信息,详情参考:无人机报文界面。
5.左侧面板切换为排班信息
 :点击后图标变为蓝色
:点击后图标变为蓝色 表示当前左侧信息面板显示为当天的-排班信息,包括即将执行飞行任务的倒计时,当天的排列表,详情参考:排班信息界面。
表示当前左侧信息面板显示为当天的-排班信息,包括即将执行飞行任务的倒计时,当天的排列表,详情参考:排班信息界面。
6.实时信息面板
实时信息面板主要显示机库实时报文信息、无人机实时报文信息、当日任务排班信息。具体内容参考:机库报文界面、无人机报文界面、排班信息界面。
7.起点
显示当前无人机的起点机库。
8.终点
显示当前无人机将要降落的机库。若当前无人机存在飞行任务,起点与终点之间将会显示无人机当前所处的任务航点序号,其中无人机已经过的航点为绿色,未经过的为白色,如图:

上图表示当前无人机起点机库在金桥麦腾站点,降落机库也处于金桥麦腾站点。其中任务航点共四个,已执行完毕1、2航点任务。
9.电量
 :显示当前无人机电池电量的百分比。
:显示当前无人机电池电量的百分比。
10.GPS信号
显示当前无人机的GPS信号等级,等级从一至五,共五个等级,等级越高信号越强。
 :表示无信号。
:表示无信号。
 :表示GPS信号为等级一。
:表示GPS信号为等级一。
 :表示GPS信号为等级二。
:表示GPS信号为等级二。
 :表示GPS信号为等级三。
:表示GPS信号为等级三。
 :表示GPS信号为等级四。
:表示GPS信号为等级四。
 :表示GPS信号为等级五。
:表示GPS信号为等级五。
11.返回
 :点击返回上一次访问的页面。
:点击返回上一次访问的页面。
12.急停
 :点击此按钮将给正在飞行的无人机发送紧急停止的指令,此指令区别于暂停,不可恢复。
:点击此按钮将给正在飞行的无人机发送紧急停止的指令,此指令区别于暂停,不可恢复。
13.锁定
 :点击锁定按钮,将会锁定地图上的无人机,即地图始终以无人机位置为中心点,再次点击按钮变为白色,表示取消锁定。
:点击锁定按钮,将会锁定地图上的无人机,即地图始终以无人机位置为中心点,再次点击按钮变为白色,表示取消锁定。
14.视角选择
 :视角选择,当被点击时在其正下方会出现视角菜单,包括:第一视角、第三视角、内窥视角、识别模块的选择菜单,再次点击该按钮将隐藏视角选择菜单。在视角菜单中被勾选上的菜单模块在地图左侧区域将会显示对应的视频窗口,取消勾选将会销毁对应的视频窗口,打开的视频支持放大、缩小、移动位置。视频的显示与操作参考视频操作 。
:视角选择,当被点击时在其正下方会出现视角菜单,包括:第一视角、第三视角、内窥视角、识别模块的选择菜单,再次点击该按钮将隐藏视角选择菜单。在视角菜单中被勾选上的菜单模块在地图左侧区域将会显示对应的视频窗口,取消勾选将会销毁对应的视频窗口,打开的视频支持放大、缩小、移动位置。视频的显示与操作参考视频操作 。
15.拍照
 :点击拍照按钮,当前连接的无人机将执行一次拍照动作。
:点击拍照按钮,当前连接的无人机将执行一次拍照动作。
16.录像
 :点击开始录像按钮,无人机将开始录像,此时按钮变为暂停键
:点击开始录像按钮,无人机将开始录像,此时按钮变为暂停键 ,再次点击停止录制。
,再次点击停止录制。
17.展开右侧面板
 点击展开面板,右侧信息面板将被打开,此时图标变为
点击展开面板,右侧信息面板将被打开,此时图标变为 ,再次点击收起功能面板。面板内容包括全自动任务、无人机控制面板、媒体资源管理,以及无人机立即返航指令等,每个菜单通过点击展开与收起。此面板主要用于对无人机下发任务以及控制无人机与无人机载荷等。展开如下图:
,再次点击收起功能面板。面板内容包括全自动任务、无人机控制面板、媒体资源管理,以及无人机立即返航指令等,每个菜单通过点击展开与收起。此面板主要用于对无人机下发任务以及控制无人机与无人机载荷等。展开如下图:

媒体资源菜单单击打开,将出现 按钮,点击按钮将无人机SD卡中的照片视频等上传至服务器。在面板底部
按钮,点击按钮将无人机SD卡中的照片视频等上传至服务器。在面板底部 按钮,点击该按钮,在弹出的确认框中选择返航的方式:备降点,起飞点。一旦点击选择了返航方式,指令将直接发送给无人机,指令发送成功将提示“发送成功”,如发送失败,将弹出失败原因的消息提示。
按钮,点击该按钮,在弹出的确认框中选择返航的方式:备降点,起飞点。一旦点击选择了返航方式,指令将直接发送给无人机,指令发送成功将提示“发送成功”,如发送失败,将弹出失败原因的消息提示。
全自动任务参考任务下发,无人机控制面板内容参照无人机控制。
18.日志
显示无人机与机库的动作日志,包括机库的充电状态、机库的工作状态、机库的硬件状态、无人机的飞行状态等。
19.水平速度
显示无人机的水平速度,单位为米/秒。
20.垂直速度
显示无人机的垂直速度,单位为米/秒。
21.电池电量
显示无人机的电池剩余电量的百分比。
22.飞行高度
显示无人机的飞行高度,此高度为距起点的高度,单位为米。
23.飞行航向
显示无人机的飞行航向。
24.地图
地图界面,显示要素包括:站点,无人机,飞行航线,实时轨迹等。
祺云地图支持显示卫星与自建图层,通过地图右下角图层选择进行切换与显示,可查看地图操作获取更多关于地图信息。
# 无人机报文界面

1.无人机的实时状态以及天气情况,包括: 离线、在线、初期化、初始化、待命、初期化、开机库、任务自检、起飞自检、充电中任务、起飞、任务中、陆点任务、动作待命、动作执行、不可调飞、可调飞等。当需要下发任务时,应注意此时无人机的状态是否满足条件,例如执行任务中的状态以及雨天则不可调飞。
2.无人机的基本信息,包括:型号、编号、载荷、更新时间等。
3.实时报文信息
 :WGS84格式的经纬度。
:WGS84格式的经纬度。
 :无人机海拔高度,单位:米。
:无人机海拔高度,单位:米。
 :无人机的偏航角,显示格式为:航偏角。
:无人机的偏航角,显示格式为:航偏角。
 :无人机的水平速度,单位:米/秒。
:无人机的水平速度,单位:米/秒。
 :无人机的垂直速度,即爬升率,单位:米/秒。
:无人机的垂直速度,即爬升率,单位:米/秒。
 :无人机电池剩余电量百分比。
:无人机电池剩余电量百分比。
 :无人机温度,单位:℃。
:无人机温度,单位:℃。
 :GPS星数。
:GPS星数。
 :GPS等级。
:GPS等级。
 :上行信号。
:上行信号。
 :下行信号。
:下行信号。
 :云台俯仰角。
:云台俯仰角。
 :云台航偏角。
:云台航偏角。
 :云台镜头。
:云台镜头。
 :镜头放大倍率。
:镜头放大倍率。
 :无人机距离起点的距离,单位:米。
:无人机距离起点的距离,单位:米。
 :无人机距离终点的距离,单位:米。
:无人机距离终点的距离,单位:米。
 :天枢状态,是否在线。
:天枢状态,是否在线。
 :是否正在录像。
:是否正在录像。
# 机库报文界面

- 当前机库状态,包括:是否空闲。
- 站点机库的型号图。
- 机库的基本信息,类型以及编号。
- 实时报文信息:天花板状态、工作状态、升降台状态、横杆状态、卡爪状态、是否充电、充电进行中的流程。
# 排班信息界面

1.下一架次的倒计时。
2.待执行任务的基本信息:任务名称,执行的时间。
3.当天计划排班信息以及执行状态,对于未执行的任务通过点击 按钮并在弹出的确认框中点击确定按钮对任务进行取消,若取消成功将会在页面弹出成功的提示,否则取消失败,需要联系管理员进行处理。
按钮并在弹出的确认框中点击确定按钮对任务进行取消,若取消成功将会在页面弹出成功的提示,否则取消失败,需要联系管理员进行处理。
# 任务下发与控制
当需要给无人机进行任务下发时,请确保做好准备工作,包括:确保天气情况允许(是否是恶劣天气,是否风速允许等)、无人机当前状态可进行下发(可通过操作中心无人机报文信息查看无人机的实时状态,确保无人机电量成充足等,是可调飞状态)、无人机所处机库状态允许、降落机库状态允许(可查看机库实时报文信息获取状态)、飞行里程适中、网络状态允许。当确定先决条件允许下发任务,可按照以下流程进行任务的下发。
单击主界面展开面板按钮 ,右侧面板被打开,点击全自动任务菜单的 > 箭头展开全自动内容,内容如下图所示:
,右侧面板被打开,点击全自动任务菜单的 > 箭头展开全自动内容,内容如下图所示:

下拉选择执行的任务(任务列表来在自任务规划中规划并保存的所有任务),并下拉完成动作,默认为“自动返航”,点击立即下发按钮,指令发送成功后,将会在地图看看到所选色任务航线,此时为了确保飞行的安全,无人机将进入起飞前的自检流程。自检时将弹出自检清单,自检内容如下:
 :检查当前天气情况,风速需要小于13.8米/秒,无雨雪情况。
:检查当前天气情况,风速需要小于13.8米/秒,无雨雪情况。 :检查任务里程是否小于30公里,任务预计执行时间是否小于当前无人机的续航时间。
:检查任务里程是否小于30公里,任务预计执行时间是否小于当前无人机的续航时间。 :检查无人机自身状态,状态允许调飞、续航大于任务预计执行时间、电池电量至少60% 。
:检查无人机自身状态,状态允许调飞、续航大于任务预计执行时间、电池电量至少60% 。
每一项检查条目尾部图标表示检查结果,其中:
 :表示该项条目通过检查。
:表示该项条目通过检查。
 :表示该项条目检查未通过。
:表示该项条目检查未通过。
 :表示该项条目检查结果为警告,需要注意,但属于通过了检查。
:表示该项条目检查结果为警告,需要注意,但属于通过了检查。
 :表示该项条目正在检查或待检查。
:表示该项条目正在检查或待检查。
底部中间图标显示为 ,表示检查进行中。
,表示检查进行中。
当所有检查都完成,图标变为 ,表示程序对无人机的检查未通过。此时是无法继续执行飞行任务的,这时可以通过每一项检查的结果进行分析并解决。
,表示程序对无人机的检查未通过。此时是无法继续执行飞行任务的,这时可以通过每一项检查的结果进行分析并解决。
当所有检查都完成图标变为 ,表示程序对无人机检查已经完毕并通过了检查。此时会看到底部
,表示程序对无人机检查已经完毕并通过了检查。此时会看到底部 按钮变为
按钮变为 ,此时如果想要继续执行下发任务,可单击发送任务按钮,点击“取消发送”按钮将会取消下发任务。继续点击“发送任务”
,此时如果想要继续执行下发任务,可单击发送任务按钮,点击“取消发送”按钮将会取消下发任务。继续点击“发送任务” 按钮,任务正式下发,此时将会弹出无人机起飞前的准备流程图,如下所示:
按钮,任务正式下发,此时将会弹出无人机起飞前的准备流程图,如下所示:

检查任务自检是否完成
检查机库舱门是否开启
检查平台是否上升
检查横杠是否松开
检查卡爪是否松开
起飞自检
无人机起飞
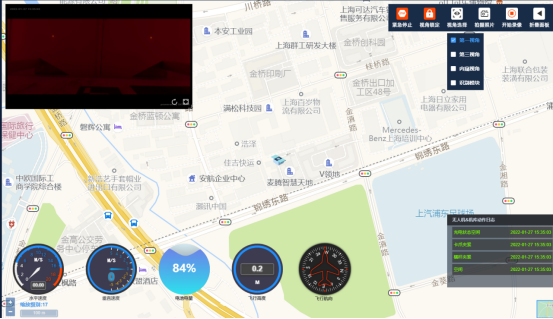
当无人机完成并通过以上所有检查后,无人机执行起飞动作,准备流程弹框将消失,在地图上可以看到正在飞行的无人机,以及它的实时轨迹(绿色的折线),执行任务时,可以通过左侧的信息面板查看无人机与机库的实时报文,无人机每次动作都都在日志面板上。可以根据实际需要,按下主界面上的按钮发送相应指令。
执行任务时无人机与任务航线视图以及第一视角视频如下:

如果需要控制任务,如暂停任务、恢复任务、停止任务,可以在主界面单击展开面板 ,点击无人机控制面板 > ,在显示的面板信息中,选择“任务控制”下的按钮进行发送指令:
,点击无人机控制面板 > ,在显示的面板信息中,选择“任务控制”下的按钮进行发送指令:
 :点击暂停,将会弹出暂停任务的确认框,点击确定后将暂停任务。
:点击暂停,将会弹出暂停任务的确认框,点击确定后将暂停任务。
 :恢复暂停,将会弹出恢复任务的确认框,点击确定后将恢复任务。
:恢复暂停,将会弹出恢复任务的确认框,点击确定后将恢复任务。
 :点击停止,将会弹出停止任务的确认框,点击确定后将停止任务。
:点击停止,将会弹出停止任务的确认框,点击确定后将停止任务。
如果想要对无人机或无人机云台发出更精细的指令可以参考无人机控制、云台控制。
# 无人机与云台控制
在主界面单击展开面板,点击面板中的菜单:无人机控制面板 > 将看到:

 无人控制图 云台控制图
无人控制图 云台控制图
# 无人机控制:
1.:点击暂停,将会弹出暂停任务的确认框,点击确定后将暂停任务。
2.:恢复暂停,将会弹出恢复任务的确认框,点击确定后将恢复任务。
3.:点击停止,将会弹出停止任务的确认框,点击确定后将停止任务。
4.圆盘可用来调节无人机的位置,依次是向北、向东、向南、向西,经纬度调整。

a.  :向北调整位置,距离由圆盘下方的平移步长决定。
:向北调整位置,距离由圆盘下方的平移步长决定。
b.  :向东调整位置,距离由圆盘下方的平移步长决定。
:向东调整位置,距离由圆盘下方的平移步长决定。
c.  :向南调整位置,距离由圆盘下方的平移步长决定。
:向南调整位置,距离由圆盘下方的平移步长决定。
d.  :向西调整位置,距离由圆盘下方的平移步长决定。
:向西调整位置,距离由圆盘下方的平移步长决定。
5.下图用来调节无人机高度:
a. :垂直向上调整位置,距离由下方的高度步长决定。
b. :垂直向下调整位置,距离由下方的高度步长决定。
6.无人机控制区的滑块可以滑动用来调整无人机的航向(范围:-180°至180°):
a. :降低无人机航向值,每次降低3° 。
:降低无人机航向值,每次降低3° 。
b. :增加无人机航向值,每次增加3° 。
:增加无人机航向值,每次增加3° 。
7.镜头选择:
a. :点击“可视”按钮,当前无人机镜头将切换为可视模式。
:点击“可视”按钮,当前无人机镜头将切换为可视模式。
b. :点击“红外”按钮,当前无人机镜头将切换为红外模式。
:点击“红外”按钮,当前无人机镜头将切换为红外模式。
c. :点击“广角”按钮,当前无人机镜头将切换为广角模式。
:点击“广角”按钮,当前无人机镜头将切换为广角模式。
8.其他控制:
a.急停:点击主界面按钮 ,对无人机发出紧急停止指令。
,对无人机发出紧急停止指令。
b.拍照:点击主界面按钮 ,对无人机发出拍照指令。
,对无人机发出拍照指令。
c.录像:点击主界面按钮 ,对无人机发出录像指令。
,对无人机发出录像指令。
d.停止录像:点击主界面按钮 ,对无人机发出停止录像指令。
,对无人机发出停止录像指令。
e.立即返航:展开主界面面板,在面板底部点击按钮 ,在弹出的确认框中选 择返航的方式:返回备降点或返回起飞点,一旦点击选择了返航方式,指令将直接发送 给无人机,指令发送成功将提示“发送成功”,如发送失败,将弹出失败原因的消息提示。
,在弹出的确认框中选 择返航的方式:返回备降点或返回起飞点,一旦点击选择了返航方式,指令将直接发送 给无人机,指令发送成功将提示“发送成功”,如发送失败,将弹出失败原因的消息提示。
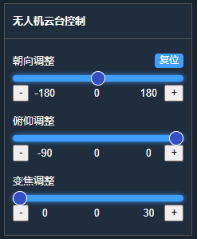
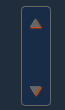
# 云台控制:
- 调整云台朝向:通过滑动滑块调整数值或点击 +或 - 进行数值的加减调整,每次步长为 3°,范围 为:-180°值180°,数值每次改变都将给无人机发送调整朝向指令,并提示操 作成功与否 。
- 调整俯仰角:通过滑动滑块调整数值或点击 +或 - 进行数值的加减调整,每次步长为1°, 范围为:-90°值0°,数值每次改变都将给无人机发送调整俯仰角指令,并提示操作成功 与否 。
- 调整焦距:通过滑动滑块调整数值或点击 +或 - 进行数值的加减调整,每次步长为1倍, 范围为:0倍值30倍,数值每次改变都将给无人机发送调整焦距指令,并提示操作成功 与否 。
- 复位:点击按钮
 将立即给无人机发送云台复位指令。
将立即给无人机发送云台复位指令。
视频操作
当点击主界面视角选择按钮,将出现:第一视角、第三视角、内窥视角、识别模块的选择菜单,如图:

通过勾选各项,对应字体将会变蓝,如勾选上第一视角: ,同时在地图左侧区域将会随即出现对应的实时视频。取消勾选后,对应的视频将被销毁,显示如下:
,同时在地图左侧区域将会随即出现对应的实时视频。取消勾选后,对应的视频将被销毁,显示如下:
在视频右下角,包含三个功能按钮:
 :点击此按钮将会重新拉流刷新视频。
:点击此按钮将会重新拉流刷新视频。
 :将视频全屏播放。
:将视频全屏播放。
 :按下右下角图标并拉动将放大视频。
:按下右下角图标并拉动将放大视频。
此外,左单击视频不抬起同事挪动光标位置,可将视频的位置移动。在视频上滚动滑轮可将视频放大或缩小。
# 站点管理
# 主界面介绍

- 新增站点
 :点击按钮进入站点新增/修改页面。
:点击按钮进入站点新增/修改页面。 - 站点信息
a.基本信息
显示站点名称、站点编号、站点模式(包括:固定机库+射频箱、射频箱、单兵中枢、移动机库)、地址、最后更新时间。
b.实时报文信息
显示机库实时状态、无人机实时状态、天枢实时状态、天气情况、风速等。
c.详情
 :点击按钮将进入站点详情页面,查看站点信息并支持站点编辑,参照站点新增/修改页面。
d.查看位置
:点击按钮将进入站点详情页面,查看站点信息并支持站点编辑,参照站点新增/修改页面。
d.查看位置
 :点击地址后的蓝色文字,将弹出一个地图框,在地图上会显示该站点的具体位置。
e.删除站点
:点击地址后的蓝色文字,将弹出一个地图框,在地图上会显示该站点的具体位置。
e.删除站点
 :点击删除按钮,将在按钮上方出现悬浮的确认框,点击确定按钮将直接删除该站点,点击取消按钮将取消删除。
f.操作中心
:点击删除按钮,将在按钮上方出现悬浮的确认框,点击确定按钮将直接删除该站点,点击取消按钮将取消删除。
f.操作中心
 :点击进入该站点的操作中心界面,参照操作中心说明文档。
g.计划任务
:点击进入该站点的操作中心界面,参照操作中心说明文档。
g.计划任务
 :点击进入该站点的定时计划任务界面,参照计划任务说明文档。
:点击进入该站点的定时计划任务界面,参照计划任务说明文档。
# 站点新增/修改页面
站点新增/修改页面界面

说明:该页面可通过站点列表菜单页新增按钮点击进入,或详情按钮点击进入。新增模式进入时,左下角按钮为新增按钮 。详情模式进入,支持修改站点信息,此时左下角按钮显示为修改按钮
。详情模式进入,支持修改站点信息,此时左下角按钮显示为修改按钮 。
站点新增与编辑界面要素:
。
站点新增与编辑界面要素:
- 站点名称:非特殊字符串且长度必须大于等于4位。
- 站点编号:必须以ST_开头,拼接自然数并保持字符整体长度为11位,自然数编号不足11位的,前面依次以数字0补齐,如ST_00000099,ST_00000100。
- 站点模式:可选项为:固定机库+射频箱、射频箱、单兵中枢、移动机库。
 站点位置:可手动设置经纬度,英文逗号分割,或者点击设置站点位置按钮
站点位置:可手动设置经纬度,英文逗号分割,或者点击设置站点位置按钮 进入设置站点位置模式,在地图上打点设置,其中地图上站点位置图标为,输入框的值与图标的位置是一致的,即输入框经纬度改变,那么地图上的图标也会相应地移到该位置上。
进入设置站点位置模式,在地图上打点设置,其中地图上站点位置图标为,输入框的值与图标的位置是一致的,即输入框经纬度改变,那么地图上的图标也会相应地移到该位置上。 备降点位置:可手动设置经纬度,英文逗号分割,或者点击设置备降点位置按钮
备降点位置:可手动设置经纬度,英文逗号分割,或者点击设置备降点位置按钮 进入设置备降点设置模式,在地图上打点设置,其中地图上备降点位置图标为,输入框的值与图标的位置是一致的,即输入框经纬度改变,那么地图上的图标也会相应地移到该位置上。一个站点的备降点用于站点无人机的可选备降,如在操作中心对无人机下发立即返航指令时可选择返航方式为‘’备降点‘’,返回此站点的备降点位置。
进入设置备降点设置模式,在地图上打点设置,其中地图上备降点位置图标为,输入框的值与图标的位置是一致的,即输入框经纬度改变,那么地图上的图标也会相应地移到该位置上。一个站点的备降点用于站点无人机的可选备降,如在操作中心对无人机下发立即返航指令时可选择返航方式为‘’备降点‘’,返回此站点的备降点位置。 安全位置:可手动设置经纬度,英文逗号分割,或者点击设置安全位置按钮
安全位置:可手动设置经纬度,英文逗号分割,或者点击设置安全位置按钮 进入设置安全位置模式,在地图上打点设置,其中地图上安全位置图标为,输入框的值与图标的位置是一致的,即输入框经纬度改变,那么地图上的图标也会相应地移到该位置上。
进入设置安全位置模式,在地图上打点设置,其中地图上安全位置图标为,输入框的值与图标的位置是一致的,即输入框经纬度改变,那么地图上的图标也会相应地移到该位置上。- 海拔高度:设置站点的海拔高度,单位:米。
- 返航高度:设置站点的返航高度,单位:米。
- 第三视角:设置站点的第三视角flv格式的视频流地址(视频可在操作中心进行查看)。
- 站点新增
 :完成站点基本信息的填写并确保表单信息无错误提示,点击新增按钮将创建成功。
11.站点编辑
:点击修改按钮,将直接修改站点信息。
:完成站点基本信息的填写并确保表单信息无错误提示,点击新增按钮将创建成功。
11.站点编辑
:点击修改按钮,将直接修改站点信息。
# 设备管理
# 机库
# 机库管理主界面

1.检索:点击查询按钮 可通过机库编号匹配机库并在表格中展示。
2.新增:点击新增机库按钮
可通过机库编号匹配机库并在表格中展示。
2.新增:点击新增机库按钮 ,弹出以下新增机库弹框信息:
,弹出以下新增机库弹框信息:
新增机库要素:
a.机库编号:必须以HIVE_UH3(三代机库MK3)或HIVE_UH4(四代机库MK4)或HIVE_UH5_(五代机库MK5)或开头,其后以自然数编号进行拼接,并且数字必须只能等于6位不满6位前面以数字0补齐,如:HIVE_UH5_000002。
b.机库类型:包括MK3、MK4、MK5。
c.机库名称:至少4个不包含特殊字符的字符串。
d.所属站点:根据需要选择所属站点,若不存在站点选择,可在站点管理中进行站点添加,参照:站点新增/修改页面 。
e.机库类型:固定、移动。
f.内窥视角:站点的视频流地址。
g.机库描述:添加机库的描述语句,非必填项。
h.完成新增的基本要素的添加,点击确定按钮 完成新增操作,点击取消按钮取消新增。
完成新增操作,点击取消按钮取消新增。
3.修改:点击修改按钮 弹出下面弹框:
弹出下面弹框:
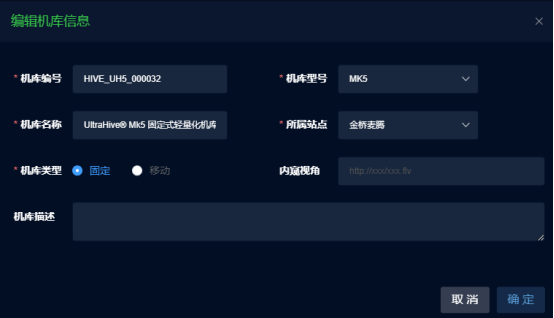
修改机库要素参照新增机库要素。
4.删除:点击某行站点的删除按钮 ,在弹出删除对话框点击确定按钮进行删除操作。
,在弹出删除对话框点击确定按钮进行删除操作。
# 无人机
无人机管理主界面

1.检索:点击查询按钮可通过无人机编号匹配无人机并在表格中展示。
2.新增:点击新增无人机按钮 ,弹出以下新增无人机弹框信息:
,弹出以下新增无人机弹框信息:

新增无人机要素:
a.无人机编号:必须以UAV_M300_或UAV_M210V2_或UAV_P4P_开头,其中M300表示大疆经纬M300,M210V2表示大疆经纬M210 V2,P4P表示大疆精灵P4P。其后以自然数编号进行拼接,并且数字必须只能等于6位不满6位前面以数字0补齐,如:UAV_M300_000002。
b.无人机名称:无人机在系统中的名称。
c.机身号SN:无人机的唯一SN序列号。
d.生产商:无人机的生产厂家。
e.所属站点:选择无人机所属站点。
f.第一视角:无人机第一视角视频流地址。
g.无人机型号:包括:M210V2(大疆经纬M210 V2)、M300(大疆经纬M300)、P4P(大疆精灵P4P)。
3.修改:点击某行无人机修改按钮弹出下面弹框:

修改机库要素参照新增无人机要素。
4.删除:点击无人机对应的删除按钮,在弹出删除对话框点击确定按钮进行删除操作。
# 电池
电池管理主界面

1.检索:点击查询按钮可通过电池序列号匹配电池并在表格中展示。
2.新增:点击新增电池按钮 ,弹出以下新增电池弹框信息:
,弹出以下新增电池弹框信息:
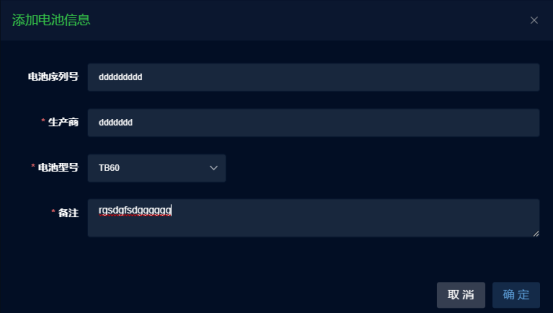
新增电池要素:
a.电池序列号:11位不包含特殊字符的字符串。
b.生产商:电池的生产厂家。
c.电池型号:TB60(大疆)、TB55(大疆)。
d.备注:对电池的信息描述。
3.修改:点击电池修改按钮弹出下面弹框:
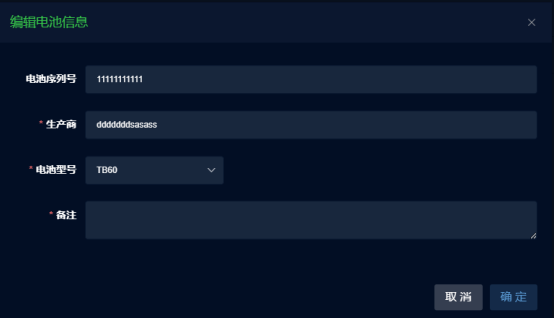
修改电池要素参照新增电池要素。
4.删除:点击电池对应的删除按钮,在弹出删除对话框点击确定按钮进行删除操作。
# 数据统计
# 飞行数据
# 主界面介绍

1.数据说明:飞行数据来源于无人机下发并执飞的任务,包括成功与失败的任务。
2.检索:点击查询按钮可通过任务名称匹配飞行任务并在表格中展示。
3.排序:可以根据表格各个表头项后上箭头 以该表头项进行升序,可以根据表头项后下箭头
以该表头项进行升序,可以根据表头项后下箭头 以该表头项进行降序。
4.表格内容包括:
a.任务批次号:蓝色的字符串,每次无人机执行一次任务的唯一标识。点击批次号进入此次任务的回放页,可进行轨迹与视频的回放,参照任务回放。
b.任务名称:无人机执行的任务的名称。
c.站点名称:无人机执行任务时起飞的站点。
d.无人机编号:无人机编号,唯一标识。
e.飞行里程:无人机执行一次任务时飞行的里程,单位:米 。
f.完成动作:无人机完成任务时的动作,包括:自动返航(往起飞点径直飞) 、终点站(任务设置的终点站点)。
g.任务状态:无人机执行任务的执行状态,包括:-待命、起飞准备中、执飞中、降落完成中、降落完成。
h.起飞时间:无人机起飞时间。
i.降落时间:无人机降落的时间。
j.创建时间:任务的创建时间,一次表示任务下发至无人机的时间。
以该表头项进行降序。
4.表格内容包括:
a.任务批次号:蓝色的字符串,每次无人机执行一次任务的唯一标识。点击批次号进入此次任务的回放页,可进行轨迹与视频的回放,参照任务回放。
b.任务名称:无人机执行的任务的名称。
c.站点名称:无人机执行任务时起飞的站点。
d.无人机编号:无人机编号,唯一标识。
e.飞行里程:无人机执行一次任务时飞行的里程,单位:米 。
f.完成动作:无人机完成任务时的动作,包括:自动返航(往起飞点径直飞) 、终点站(任务设置的终点站点)。
g.任务状态:无人机执行任务的执行状态,包括:-待命、起飞准备中、执飞中、降落完成中、降落完成。
h.起飞时间:无人机起飞时间。
i.降落时间:无人机降落的时间。
j.创建时间:任务的创建时间,一次表示任务下发至无人机的时间。
# 任务回放
# 主界面介绍

进入方式:可以在飞行数据页面点击批次号进入。
 :返回,点击返回飞行数据页面。
:返回,点击返回飞行数据页面。地图 机库:
 表示无人机执行任务时的起飞机库。
无人机:
表示无人机执行任务时的起飞机库。
无人机: 表示无人机飞行任务中的位置。
无人机云台:
表示无人机飞行任务中的位置。
无人机云台: 表示无人机飞行任务中云台的位置。
任务航线:由黄色航点连线组成,其中航点中的数字表示航线航点序号。
实时轨迹:黄色线条。
历史轨迹:蓝色线条。
表示无人机飞行任务中云台的位置。
任务航线:由黄色航点连线组成,其中航点中的数字表示航线航点序号。
实时轨迹:黄色线条。
历史轨迹:蓝色线条。无人机姿态信息:
 :无人机滚转角与俯仰角。
:无人机滚转角与俯仰角。
 :无人机偏航角。
:无人机偏航角。流程信息: 无人机从开始起飞到完成飞行任务整个过程中的节点流程,包括:初期化、初始化、待命、开机库、任务自检、起飞自检、充电中任务、起飞、爬升、任务中、陆点任务、动作待命、动作执行、暂停、悬停、全手动、陆点悬停、开机库、、等状态、自动返航、自定义返航备降点降落、返航降落、、自定义降落手动介入控制、关机库、雨天、雾天、'大风、夜晚、冷却、不可飞、可调飞、设备维护、未知、无人机开启、通知OSDK上传、OSDK图片上传中、无人机需关闭、软件更新、离线。其中绿色节点表示该时间节点上的流程节点。
视频区域: 视频操作按钮: a.
 :将视频与地图互展示区域相切换。
:将视频与地图互展示区域相切换。
b. :回放任务,当点击播放按钮后进入播放模式,此时图标变为回放暂停按钮,点击此按钮将暂停回放任务,此时图标变回
:回放任务,当点击播放按钮后进入播放模式,此时图标变为回放暂停按钮,点击此按钮将暂停回放任务,此时图标变回 。当处于播放模式时,根据历史数据,时间/高度速度折线图会刷新,地图上的无人机也将刷新航迹,视频也饿会实时播放,报文信息
。当处于播放模式时,根据历史数据,时间/高度速度折线图会刷新,地图上的无人机也将刷新航迹,视频也饿会实时播放,报文信息
c. :重置,将回放中的任务执行的时间重置为初始位置。
:重置,将回放中的任务执行的时间重置为初始位置。
d. :1倍速,设置任务回放的倍速为一倍,设置后字体为蓝色。
:1倍速,设置任务回放的倍速为一倍,设置后字体为蓝色。
e. :2倍速,设置任务回放的倍速为二倍,设置后字体为蓝色。
:2倍速,设置任务回放的倍速为二倍,设置后字体为蓝色。
f. :4倍速,设置任务回放的倍速为四倍,设置后字体为蓝色。
:4倍速,设置任务回放的倍速为四倍,设置后字体为蓝色。
g. :视频全屏按钮,点击按钮视频进去全屏模式。
:视频全屏按钮,点击按钮视频进去全屏模式。
h. :下载视频,点击下载视频,并弹出进度弹窗点击弹窗取消按钮
:下载视频,点击下载视频,并弹出进度弹窗点击弹窗取消按钮 取消视频下载。
取消视频下载。
i.设置视频步进: :减少视频步进,
:减少视频步进, :增加视频步进,其中步长都为0.5秒。因视频在存储过程中存在延迟,所以视频一般会比无人机轨迹出现延迟,增加适当步长可使视频与无人机位置更加精确。
:增加视频步进,其中步长都为0.5秒。因视频在存储过程中存在延迟,所以视频一般会比无人机轨迹出现延迟,增加适当步长可使视频与无人机位置更加精确。时间/高度速度折线图 横轴为时间,纵轴左侧刻度为高度,绿色的折线与文字表示各时间无人机的飞行的高度(单位:米),纵轴右侧刻度为速度,黄色的折线与文字表示各时间无人机的飞行的速度(单位:米/秒)。可以通过滑动时间轴的滑块改变时间,此刻地图的实时轨迹、无人机图标和视频播放的时间都会改变为滑动的时间。当点击了视频的播放按钮,滑块会根据当前的倍速情况自动滑动。
任务的基本信息 包括:任务名称、站点名称、任务批次、任务开始时间与结束时间 查看操作记录:点击蓝色的字体“查看操作记录”,弹出操作记录列表:

点击弹框中的取消按钮 关闭弹框。
关闭弹框。
- 无人机报文信息:
:WGS84格式的经纬度。
:无人机海拔高度,单位:米。
:无人机的偏航角,显示格式为:航偏角。
:无人机的水平速度,单位:米/秒。
:无人机的垂直速度,即爬升率,单位:米/秒。
:无人机电池剩余电量百分比。
:无人机温度,单位:℃。
:GPS星数。
:GPS等级。
:上行信号。
:下行信号。
:云台俯仰角。
:云台航偏角。
:云台镜头。
:镜头放大倍率。
:无人机距离起点的距离,单位:米。
# 计划任务管理
# 主界面

- 检索:点击查询按钮可通过选择站点名称下拉、创建时间、开始日期与结束日期进行匹配检索。
- 新增:点击新增机库按钮,弹出以下新增弹窗信息:

新增要素:
- 站点名称:下拉选择计划任务执行的站点。
- 任务名称:下拉选择执行的任务。
- 执行模式:单次、每天、每周、每月。
- 执行时间:选择执行任务的时间(时分秒)
- 执行日期:计划任务执行的日期。
- 生效日期:设置除了单次模式的计划任务的生效日期。
- 备注:对计划任务的备注描述。 点击取消按钮取消操作,点击确定按钮完成新增。
# 计划任务可视化
待补充
# 用户管理
# 常见问题
# 调度问题
问:为什么偶尔会出现下发任务无反应,重复下发多次才会成功?
答:此种情况先刷新网页,或者检查一下网络,如果还是没反应,则联系祺云后台开发人员。
问:为什么祺云页面长时间登陆时,要重新刷新页面才可以继续使用?
答:网页长时间未刷新,无人机和机库的报文信息没有同步到前端,导致发调度时被卡住。
问:为什么有时候用一个账号调飞没反应换一个账号就可以?
答:正常情况下,一个账号有该站点的权限,就能调飞。此类问题是否是罕见BUG还有待考察。
问:两个站点,飞机编号一样可以正常起飞影响飞行吗?
答:祺云后台有逻辑设定,两台机库无法绑定一台无人机。
Q: 祺云正式版和测试版的具体差别以及测试版的具体用处是什么?
答:正式版用于向客户交付使用;测试版用于内部开发。
问:祺云调飞自检风速在13.8m/s时不可飞,风速仪几乎没检测到过这种风速,实际上在一段时间之内风速达到4、5m/s时就对飞行有影响了,为什么?
答:祺云设定监测到7级风以上,状态就会显示“大风”,不予调飞,这个标准也是按照M300的抗风能力制定的。
Q: 第一视角为什么画面不够清晰,放大后比较模糊,这个支持的分辨率是多少?
答:第一视角分辨率一般为1080P,是复制的安卓工控机界面。
Q: 祺云调飞发任务时工作状态容易卡住,要经常刷新页面?
答:网页长时间未刷新,无人机和机库的报文信息没有同步到前端,导致发调度时被卡住。
问:祺云可以单独设置客户观看账号吗?即:调度中心使用一个账号,另外一个观看账号异地远程登录,只是观看不允许操作。
答:目前不支持,可以开发。
# 系统状态问题
问:无人机&机库日志在机库未运行时跳状态?
答:如果无人机或者机库突然报文消失,考虑是否是断电导致。检查方法为打开机库或无人机视角,或者远程登陆向日葵检查设备状态。
问:祺云界面没状态,怎么回事?(长时间登录(多长时间?)不操作后,需要重新刷新页面,才能正常显示)
答:网页长时间未刷新,无人机和机库的报文信息没有同步到前端,导致发调度时被卡住。
问:安卓APP 账号无法登录?
答:联系后台人员,检查该账号是否被删。
Q: 祺云为什么离线了,登陆之后,站点信息全部离线?
答:在确认网络没问题的情况下,站点离线可能是祺云后台服务没启动,需要联系后台人员。
问:账号登录后,站点信息均无状态?
答:在确认网络没问题的情况下,站点离线可能是祺云后台服务没启动,需要联系后台人员。
问:为什么有时站点风速很大,但祺云检测的风速与实际情况不符?
答:这个需要现场检查风速仪是否正常运转。
问:为什么会出现天气数据不准确?
答:在现场检查风速仪,风向仪,雨雪监测仪是否正常运转。
问:为什么祺云有时会出现站点离线的状态?
答:在确认网络没问题的情况下,站点离线可能是祺云后台服务没启动,需要联系后台人员。
问:为什么有时站点风速很大,但祺云检测的风速与实际情况不符?
答:这个需要现场检查风速仪是否正常运转。
问:为什么祺云有时会出现站点离线的状态?
答:在确认网络没问题的情况下,站点离线可能是祺云后台服务没启动,需要联系后台人员。
# 界面显示问题
问:众多用户反映祺云页面美工过于丑陋?
答:我们的祺云没有配备专门的美工人员,前端建设优先考虑功能的实现,不过在这方面是否有美化界面的必要还有待斟酌,毕竟每个人的审美是不同的。
问:任务执行过程中,陆点变化超过页面显示数量时,无法显示剩余陆点信息
答:后续可改为只显示起飞点,当前点位和终点。
问: 操作中心未标明镜头型号
答:目前后台未设置登记云台型号,此功能可以加。
问:第一视角黑边框较大
答:第一视角是复制的安卓工控机的界面,和祺云展示的第一界面在长宽比例上有出入,所以两边会有黑边。
问: 祺云首页格颜色较暗,展示效果较差
答:我们的祺云没有配备专门的美工人员,前端建设优先考虑功能的实现,不过在这方面是否有美化界面的必要还有待斟酌,毕竟每个人的审美是不同的
问:祺云上可以显示准确的覆盖区域吗?
答:祺云前端可以设置是否显示覆盖区域。
问:祺云选择站点后,在地图界面上的机库标识缺失。
答:网络问题未加载出图片资源。
问:祺云算法视频长时间未打开或直接无法打开怎么处理?
答:算法视频有延迟大约20S内,算法通道有两个,如果长时间打不开,可能算法通道被占用或者关闭了,算法服务器属于AI团队管理。
问:祺云第一视角视频流传输卡顿且容易闪黑屏的情况怎么改善?
答:这种通常是拉遥控器流或者编码器推流出的问题,可以登向日葵对比检查。
# 任务规划问题
问:安排定时任务无法按周或月来排班,只能按天规划定时任务
答: 按周按月排班内测版开发中,待测试完成后迁移至公网版本。
Q: 新建任务,两点之间超过1500m或不在覆盖区域范围,两个点位不能超过1500米,因此只能规划多个点位来执飞任务
答:目前部分站点使用M210飞机,航程短,设置这个限制起到保护作用。
问:定时任务中“此刻”的时间按当前秒数定义,下发此刻任务基本无法成功,可以用调度中心下发此刻任务来代替,可否删除定时任务中的此刻功能?
答:这个按钮是可以去掉的
问:为什么定时任务不能设置成每天都执行此次任务?
答:按周按月排班内测版开发中,待测试完成后迁移至公网版本。
# 记录查询问题
问:飞行记录有些会显示暂无视频资源
答:祺云后台没有开服务,可联系后台开发人员。
问:无人机没有降落时间不能进行自动整理,需要人工加降落时间。
答:正常降落是会有降落时间的,非正常降落因为打断了流程,所以没有上传降落时间
问: 以账号名称hzl123的账号为例,在查看飞行记录选择项目或站点时,祺云会卡死,无法进行其他操作。
答:祺云的项目管理员,管理员,超级管理员三个权限都是可以调用飞行记录的。卡死现象是否属于网络问题,浏览器崩溃还是后台崩溃还有待甄别
问:飞行记录只显示飞行时间,没有记录是什么原因?
答:点任务批次号,可以查询到飞行记录,视频资源。
问:祺云飞行记录没有筛选功能,做飞行总量统计报告时要一个一个查找
答:目前飞行记录是按照项目,站点和任务划分的。
# 手动操作问题
问:操控无人机变焦操作时很难调整对准目标物,灵敏度太高以及比较费时间
答:变焦倍数太大是会导致灵敏度高,建议先变回低倍数,将目标调整到镜头中央 ,再调高倍数。
问:怎么改善平板端口切手动操作后飞行器延迟大且飞行器响应慢的情况?
答:无人机执行手动的过程中,正常会有1s左右的延迟,内网版理论会更小。但这个延迟也受网络环境的影响,会导致延迟不稳定的情况。
问:平板手降过程中降落时延迟比较大,与实际降落会有2到3秒的延迟
答:无人机执行手动的过程中,正常会有1s左右的延迟,内网版理论会更小。但这个延迟也受网络环境的影响,会导致延迟不稳定的情况。
问:为什么平板有时降落时点击紧急停止,无响应?
答:急停按钮理论上是UAV执行的最高优先级,如果急停没反应,有可能是UAV没有接收到,或者UAV卡死未执行。